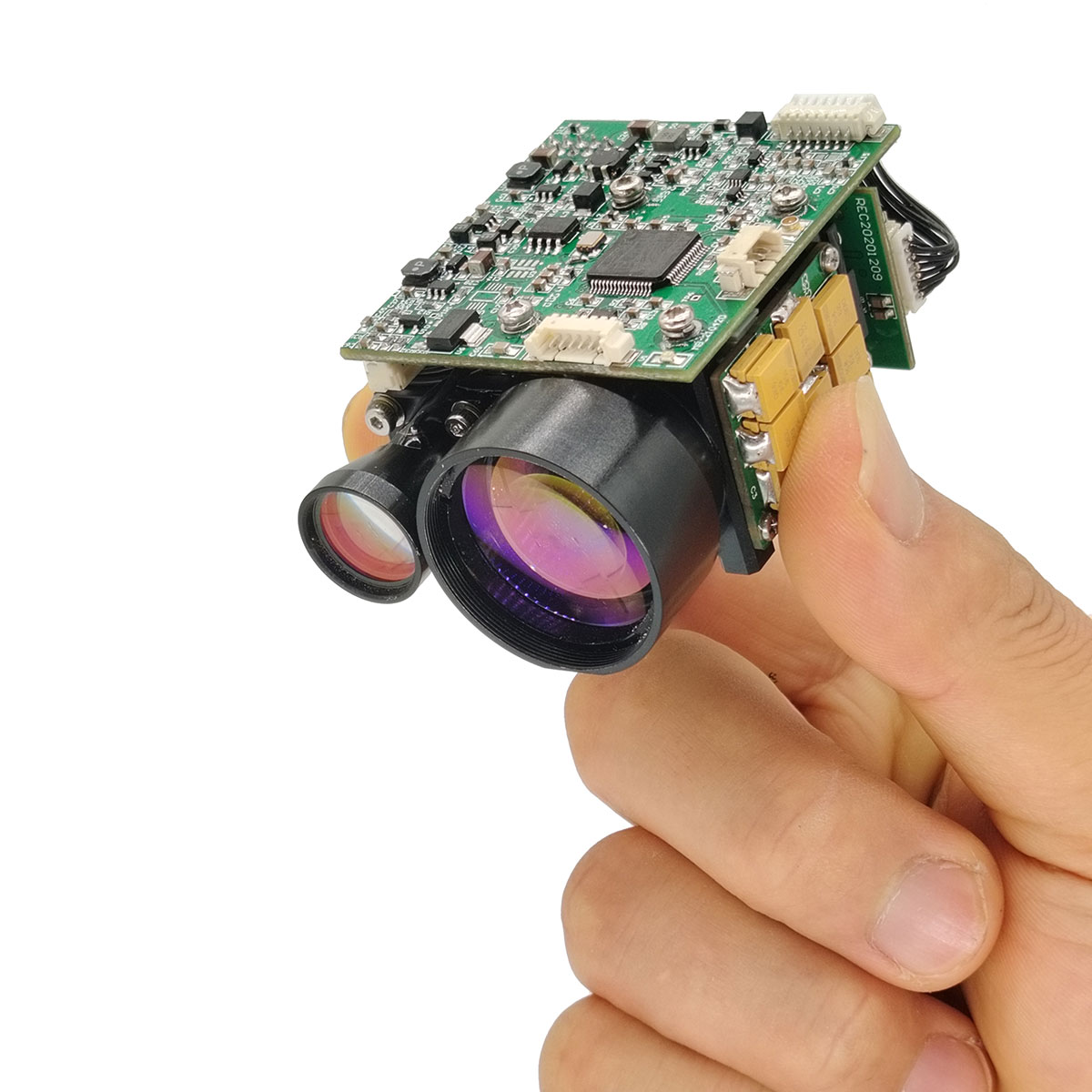
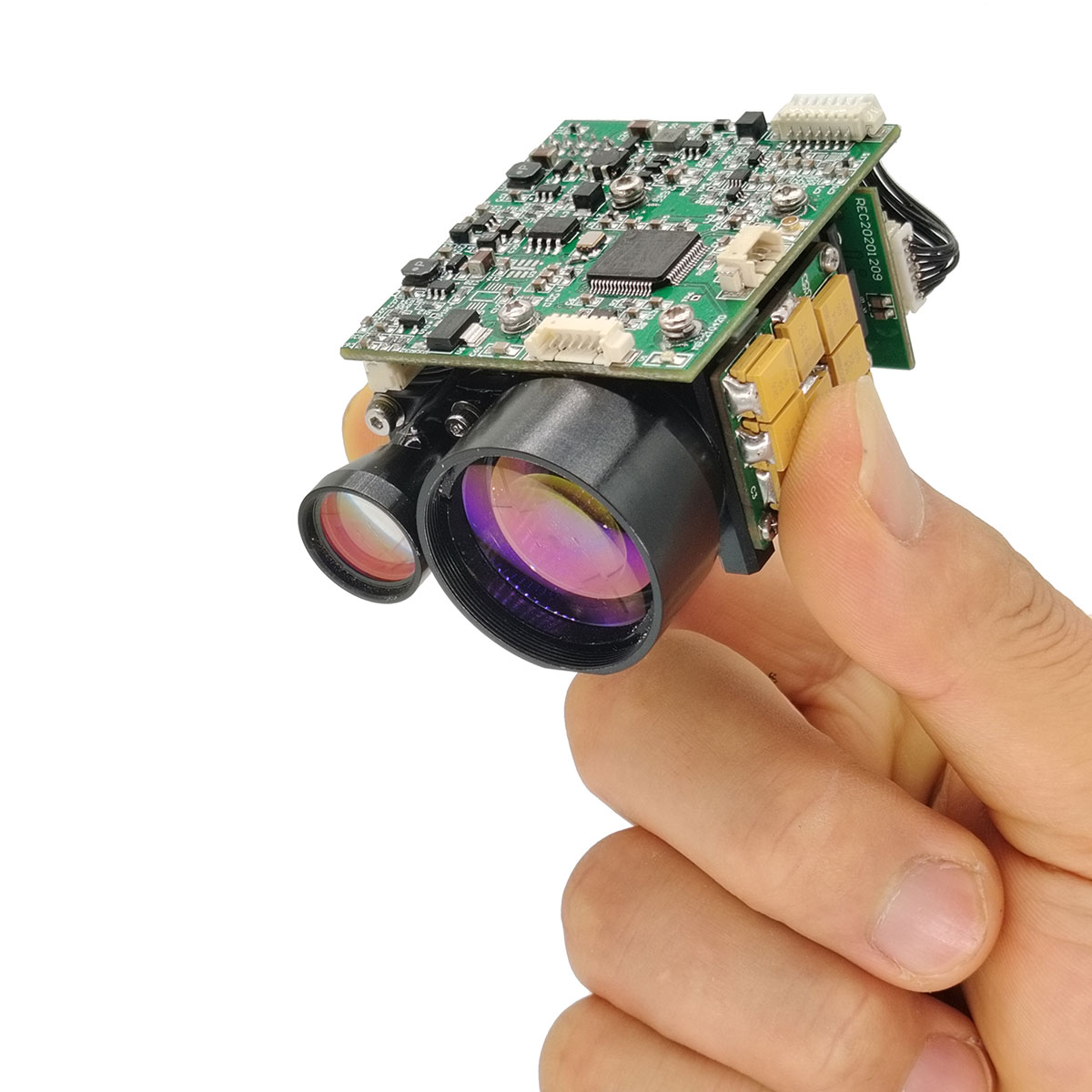
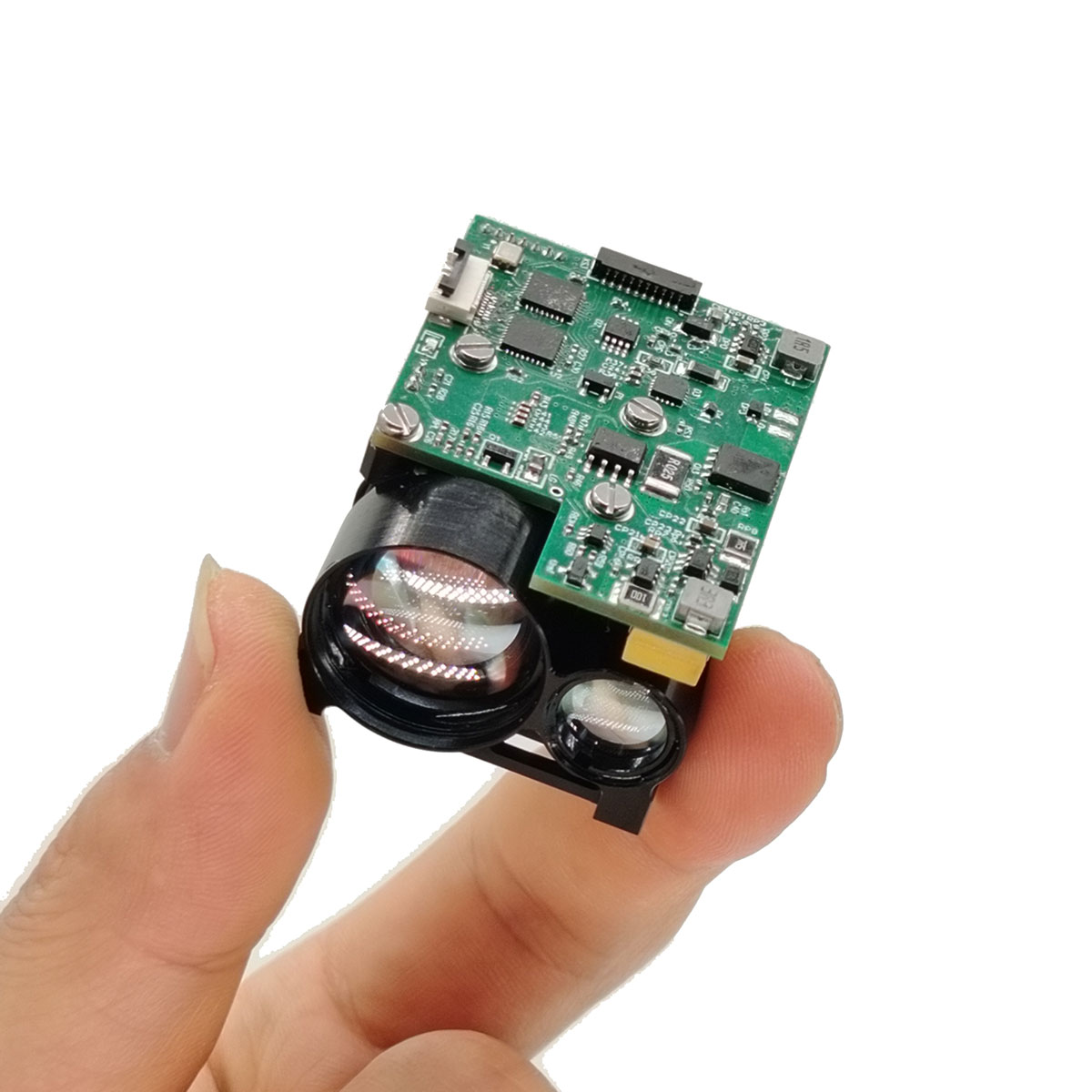
● Como fabricante profissional, gostaríamos de fornecer a você um Módulo Telêmetro Laser de segurança ocular de 20 km. O módulo telêmetro a laser STA-C2030X adota um componente de laser de vidro de érbio de 1535 nm autodesenvolvido, que possui as características de longo alcance, baixo consumo de energia, tamanho pequeno e segurança para os olhos humanos.
● Desempenho de alcance: 20.000 m (meta da OTAN), 30.000 m (alcance máximo)
● Precisão de alcance ± 1m
● Precisão de medição ≥ 98%
● Peso ≤ 380g
O módulo telêmetro a laser de segurança ocular STA-C2030X de 20 km apresenta um design seguro, construção leve, consumo de energia reduzido, vida útil prolongada e uma ampla faixa de temperatura. Amplamente empregado em tarefas como reconhecimento, levantamento topográfico e mapeamento, este módulo telêmetro a laser não possui invólucro, mas fornece uma ampla gama de interfaces para integração sem esforço em diversos sistemas. Os usuários se beneficiam da conveniência do software para PC e dos protocolos de comunicação, melhorando a usabilidade de dispositivos portáteis e sistemas multifuncionais.
Alcance de disparo único e alcance contínuo
Detecção de 3 alvos, indicação de alvo frontal e traseiro
Contém função de autoverificação
Função Wake-on-lan
Número de pulsos emitidos durante MNBF ≥1×106 vezes
Dispositivos portáteis
Veículo aéreo não tripulado
Pod eletro-óptico
Vigilância fronteiriça
| Projeto | Indicadores de Desempenho | |
| Modelo | STA-C2030X | |
| Comprimento de onda do laser | 1535±5nm | |
| Segurança ocular | Classe Ⅰ (IEC 60825-1) | |
| Ângulo de Divergência | ≤0,3mrad | |
| Campo de visão de recepção (FOV) | ~ 1,8 mrad | |
| Diâmetro da lente de lançamento | Φ18mm | |
| Diâmetro da lente do receptor | Φ60mm | |
| Faixa de medição (refletância 30%; visibilidade ≥28km) | Alcance MÁXIMO | ≥30.000 m |
| Grande alvo | ≥23.000 m | |
| Alvo da OTAN | ≥20.000 m | |
| Pessoas (0,5m×1,7m) | ≥11.000 m | |
| UAV (0,2x0,3m) | ≥4000m | |
| Faixa Mínima | 50 metros | |
| Frequência variada | 0,5~10 Hz | |
| Precisão de alcance | ±1m | |
| Resolução de intervalo | ≤30m | |
| Taxa de precisão | ≥98% | |
| Taxa de falsos alarmes | ≤1% | |
| Número de detecções de vários alvos | Até 3 alvos | |
| Interface Elétrica | molex- 532610771 | |
| Tensão de alimentação | 12V CC | |
| Consumo de energia em espera | ≤1,2W | |
| Consumo médio de energia | ≤2W | |
| Consumo máximo de energia | ≤3W | |
| Peso | ≤380g | |
| Dimensão (C×L×A) | 125mm×100mm×70mm | |
| Temperatura operacional | -40~+70 ℃ | |
| Temperatura de armazenamento | -55~+75 ℃ | |
| Resistência ao Impacto | 1200g/1ms(GJB150. 16A-2009) | |
| Antivibração | 5 ~ 50 ~ 5 Hz, faixa de 1 oitava /min, 2,5 g | |
| Lógica de alcance | Primeiro e último alvo, alcance de vários alvos, seletividade de distância | |
| Tempo de ativação | ≤950ms | |
| Interface de dados | RS422 | |
| Isolamento elétrico | Isolamento do aterramento de energia, aterramento de comunicação e aterramento da estrutura | |
| Confiabilidade | MTBF ≥ 1500h | |
| Estabilidade do eixo óptico | ≤0,05 mrad | |
| Não paralelismo entre o eixo óptico e a superfície de montagem | ≤0,5 mrad | |
| Classe de Proteção | IP67 | |
| Classe ESD | (Posição da lente) Descarga de contato 6kV Descarga de ar 8kV |
|
| Compatibilidade Eletromagnética (EMC) | Certificação CE/FCC | |
| Ecológico | RoHS2.0 | |

Modelo de conector elétrico: J30J; Os plugues e cabos correspondentes serão fornecidos pela Parte B. A definição detalhada das interfaces elétricas é mostrada na tabela a seguir:
Tabela 1 Definição de interface
| Alfinete | Definição |
| 1 | GND |
| 2 | GND |
| 3 | GND |
| 4 | VCC 12V |
| 5 | VCC 12V |
| 6 | RS422RX+ |
| 7 | RS422 RX- |
| 8 | RS422 TX- |
| 9 | RS422TX+ |
A transmissão de dados entre o telêmetro e o computador superior inclui o seguinte:
Comandos de controle: incluindo medição de distância inicial, medição de distância contínua, medição de distância única, comandos de consulta, etc.
Dados de retorno: incluindo informações de distância, temperatura ambiente, status do telêmetro, etc. A troca de dados entre o telêmetro e o computador superior adota o barramento 422. O protocolo de comunicação de software específico é o seguinte:
Formato de comunicação: comunicação RS422, taxa de transmissão 115200bps;
Formato de dados: dados de 8 bits, um bit de início, um bit de parada, sem verificação de paridade. Os dados consistem em um byte de cabeçalho, parte de comando, comprimento de dados, parte de parâmetro e byte de soma de verificação;.
Método de comunicação: O controle mestre e o telêmetro adotam um método de comunicação mestre-escravo. O controle mestre envia comandos de controle para o telêmetro, e o telêmetro recebe e executa os comandos. No estado de medição, o telêmetro envia de volta os dados e o status do telêmetro para o computador superior de acordo com o ciclo de medição. O formato de comunicação e o conteúdo do comando são mostrados na tabela abaixo.
Envio mestre
O formato da mensagem enviada é o seguinte:
| STX0 | DMC | LEN | DADOS1H | DADOS1L | CHK |
Enviar descrição do formato da mensagem
Tabela 2 Descrição do formato de envio da mensagem
| Não. | Nome | ilustrar | Código | Observação |
| 1 | STX0 | Sinalizador de início de mensagem | 55(H) | |
| 2 | DMC | Palavra de comando | Ver tabela 3 | |
| 3 | LEN | Comprimento dos dados | O número de todos os bytes, exceto o sinalizador de início, a palavra de comando e a soma de verificação | |
| 4 | DADOS | parâmetro | ||
| 5 | chegada | |||
| 6 | CHK | Verificação XOR | Exceto pelo byte de validação, outros bytes são XORed |
O comando é descrito a seguir:
Tabela 3 Descrição dos comandos e palavras de dados enviados pelo controle principal para o medidor de distância
| Não. | Palavra de comando | Funções | Byte de dados | Observações | Comprimento | código de exemplo (computação) |
| 1 | 0x00 | Espera (parada de alcance contínuo) |
DADOS=00(H) DADOS=00(H) | Distância medindo máquina para de funcionar |
6 bytes | 55 00 02 00 00 57 |
| 2 | 0x01 | Alcance único | DADOS=00(H) DADOS=00(H) | 6 bytes | 55 01 02 00 00 56 | |
| 3 | 0x02 | Alcance contínuo | DADOS=XX(H) DADOS=AA(H) | DADOS expressa o período de variação em ms. |
6 bytes | 55 02 02 03 E8 BE (variação de 1 Hz) |
| 4 | 0x03 | Autoteste | DADOS=00(H) DADOS=00(H) | 6 bytes | 55 03 02 00 00 54 | |
| 5 | 0x04 | Seleção de distância e mais próximo configuração de distância |
DADOS=XX(H) DADOS=AA(H) | DADOS expressa a zona cega valor, unidade 1m |
6 bytes | 55 04 02 00 64 37 (100m mais próximo) |
| 6 | 0x06 | Cumulativo número de consultas light out |
DADOS=00(H) DADOS=00(H) | Cumulativo número de consultas light out |
6 bytes | 55 06 02 00 00 51 |
| 7 | 0x11 | APD ligado | DADOS=00(H) DADOS=00(H) | 6 bytes | 55 11 02 00 00 46 | |
| 8 | 0x12 | APD desligado | DADOS=00(H) DADOS=00(H) | 6 bytes | 55 12 02 00 00 45 | |
| 9 | 0xEB | Consulta de número | DADOS=00(H) DADOS=00(H) | 6 bytes | 55 EB 02 00 00 AC |
l Formato de recepção mestre
O formato da mensagem recebida é o seguinte:
| STX0 | DMC | LEN | DADOS | DATA0 | CHK |
Tabela 4 Descrição do formato da mensagem recebida
| Não. | Nome | Descrição | Código | Observações |
| 1 | STX0 | Sinalizador de início de mensagem 1 | 55(H) | |
| 2 | CMD_JG | Palavra de comando de dados | Consulte a Tabela 5 | |
| 3 | LEN | Comprimento dos dados | Número de todos os bytes, exceto sinalizador de início, palavra de comando e soma de verificação | |
| 4 | Dn | Parâmetro | Consulte a Tabela 5 | |
| 5 | D0 | |||
| 6 | CHK | Soma de verificação | Todos os bytes, exceto o byte de paridade |
Descrição do status de recebimento mestre:
Tabela 5 Descrição da palavra de dados enviada do ran efinder para o controle mestre
| Não. | palavra de comando | Funções | Byte de dados | Observações | Comprimento total | ||
| 1 | 0x00 | Standby (parada de alcance contínuo) | D1=00(H) D0=00(H) | 6 bytes | |||
| 2 | 0x03 | Autoteste | D7~D0 | D0: tipo char, indica temperatura APD em graus Celsius; D1: valor de alta tensão APD, unidade V; D3-D2: valor cego, unidade 1m D5-D4: Tensão de -5V, unidade 0,01V. D7-D6: tensão de + 5 V, unidade 0,01 V |
12 bytes | ||
| 3 | 0x04 | Configuração da distância mais próxima do opt-in, unidade m | D1 D0 | DATA expressa o valor de distância mais próximo em 1m; Primeiro alto, depois baixo |
6 bytes | ||
| 4 | 0x06 | Número cumulativo de consultas light out | D3~D0 | DADOS expressa o número de vezes que a luz é emitida, 4 bytes, o byte mais alto vem primeiro | 8 bytes | ||
| 5 | 0x11 | APD ligado | DADOS=00(H) DADOS=00(H) | APD com alta tensão | 6 bytes | ||
| 6 | 0x12 | APD desligado | DADOS=00(H) DADOS=00(H) | APD sem alta tensão | 6 bytes | ||
| 7 | 0xED | Tempo limite de trabalho | 0x000x00 | O laser está protegido contra laser e não pode medir a distância. | 6 bytes | ||
| 8 | 0xEE | Erro de validação | 0x000x00 | 6 bytes | |||
| 9 | 0XEF | Tempo limite de comunicação serial | 0x000x00 | 6 bytes | |||
| 10 | 0x01 | Medição de distância única | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
Distância do primeiro alvo D8-D6 (unidade 0. 1m) Distância do segundo alvo D5-D3 (os dados são 0 quando alvo único) (unidade 0. 1m) Distância do terceiro alvo D2-D0 (os dados são 0 quando alvo único) (unidade 0. 1m) 3 alvo do byte do sinalizador D9 (bit7-bit0) próximo ao distante: D9 bit 7 indica onda principal; 1: com onda principal, 0: sem onda principal. D9 bit 6 indica onda de retorno; 1: com onda de retorno, 0: sem onda de retorno D9 bit 5 indica o status do laser; 1: laser normal, 0: falha do laser Alarme de tempo limite D9 bit 4; 1 normal, 0 tempo limite D9 bit 3 inválido, = 1 D9 bit 2 indica o status do APD; 1: normal, 0: erro D9 bit 1 indica se existe um antigo alvo; 1: alvo, 0: nenhum alvo (o alvo antes o alvo principal é o alvo anterior) D9 bit 0 indica se há um pós- alvo; 1: com alvo, 0: sem alvo (o alvo depois do alvo principal é o alvo posterior) |
14 bytes | ||
| 11 | 0x02 | Medição contínua de distância | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
Distância do primeiro alvo D8-D6 (unidade 0. 1m) Distância do segundo alvo D5-D3 (os dados são 0 quando alvo único) (unidade 0. 1m) Distância do terceiro alvo D2-D0 (os dados são 0 quando alvo único) (unidade 0. 1m) 3 alvo do byte do sinalizador D9 (bit7-bit0) próximo ao distante: D9 bit 7 indica onda principal; 1: com onda principal, 0: sem onda principal. D9 bit 6 indica onda de retorno; 1: com onda de retorno, 0: sem onda de retorno D9 bit 5 indica o status do laser; 1: laser normal, 0: falha do laser Alarme de tempo limite D9 bit 4; 1 normal, 0 tempo limite D9 bit 3 inválido, = 1 D9 bit 2 indica o status do APD; 1: normal, 0: erro D9 bit 1 indica se existe um antigo alvo; 1: alvo, 0: sem alvo (o alvo antes do alvo principal é o alvo anterior) D9 bit 0 indica se há um pós- alvo; 1: com alvo, 0: sem alvo (o alvo depois do alvo principal é o alvo posterior) |
14 bytes | ||
| 14 | 0xEB | Pesquisa de números | D16… … D0 | D15 D12 Modelo completo D11 D10 Número do produto D9 D6 Versão do software D5 D4 Número APD D3 D2 Número do laser D1 D0 Versão FPGA |
20 bytes | ||
| Observações: ① Byte/bit de dados indefinidos, o padrão é 0; | |||||||
Para mais informações sobre nossos produtos, entre em contato com Jioptik.